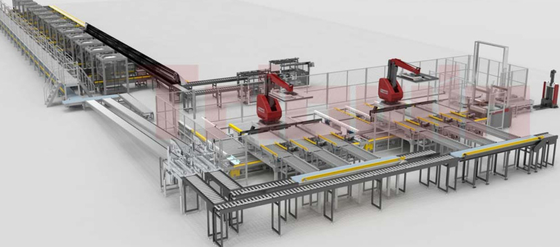
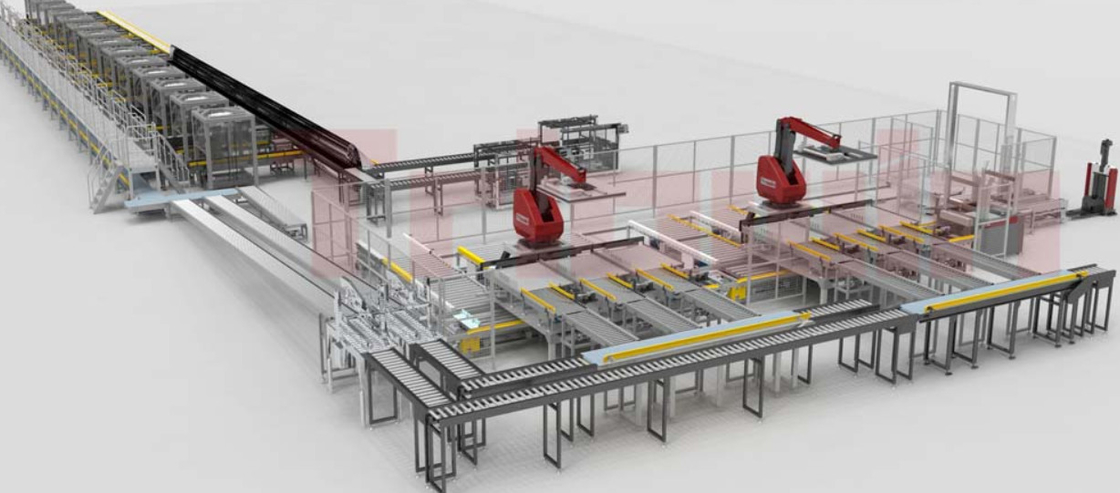
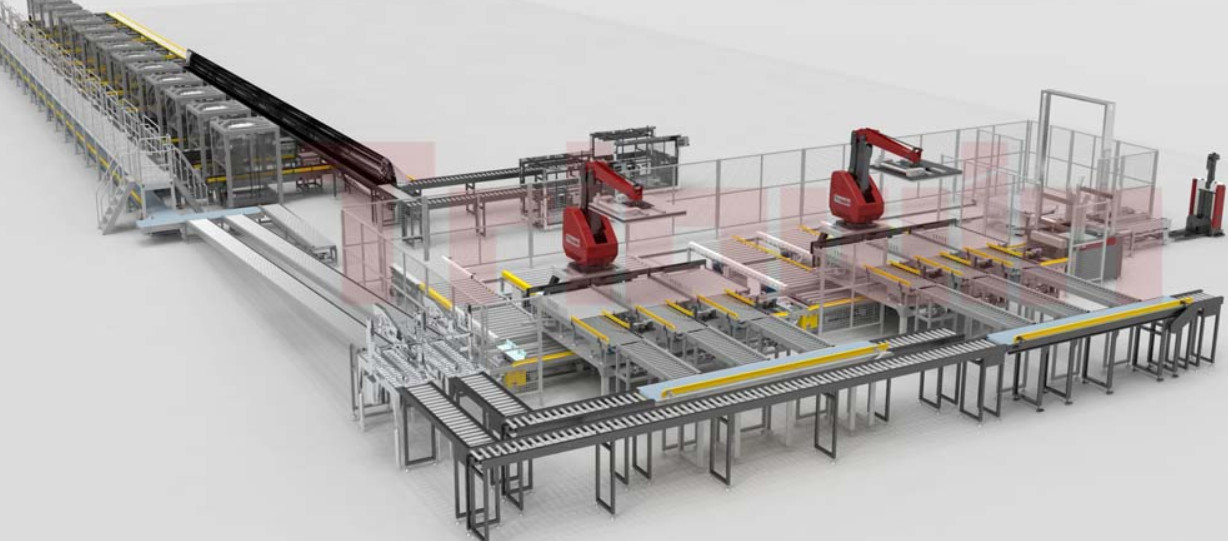
Описание продукта
Уникальный линейный приводящий механизм робота, энергосберегающая конструкция рук, простое понимание интерфейса работы, для клиентов разных производственных линий,материалы, предназначенные для профессиональных решений роботов, его превосходная точность и скорость, высокая эффективность и стабильность производительности, чтобы робот мог выполнять несколько производственных линий одновременно,грузоподъемность робота 120-300 кг, применяется к корму, химическим продуктам, зерну и нефти, продуктам питания, строительным материалам, повседневным химическим веществам, алкоголю, напиткам, фармацевтике, бытовой технике, 3C электронике и другим отраслям промышленности.
Преимущество продукта
1 уникальный линейный приводящий механизм: изобретательный механизм с четырьмя барами, позволяющий программировать действие манипулятора более просто и точно.
2 энергосберегающий дизайн защиты окружающей среды роботизированной руки: производство высокопрочного алюминиевого сплава не только делает движение руки более гибким, но и снижает потребление энергии.
3 Простая учебная операция и дружелюбный графический интерфейс работы: количество преподавателей мало, интерфейс работы прост,что облегчает отладку на месте и значительно повышает эффективность на месте.
4 мониторинг в режиме реального времени на месте: высокоточное программное обеспечение для моделирования действий на месте, которое может удаленно узнать, работает ли программа на месте в нормальном режиме,автоматическое наблюдение за помехами предотвращает столкновение помех.
С помощью мощного программного обеспечения для 3D-симуляции/программирования можно легко завершить программирование офисных роботов, планировку, мониторинг помех,Симуляция полевых действий и другие работы становятся простыми и эффективными, тем самым значительно сокращая время полевой отладки, улучшить общую эффективность производства.
Гибкое планирование:
1 Метод ручного обучения: наиболее интуитивно понятный способ обучения воспроизведению, и тогда сложная форма складирования может быть легко воспроизведена.
2 Режим программирования в автономном режиме: программирование и обнаружение процессов могут быть завершены в автономном состоянии, а программы роботов могут быть подготовлены заранее для повышения эффективности полевой работы.
3 Графическое программирование: данные паллитации могут генерироваться путем ввода различных параметров информации паллитации через сенсорный интерфейс человека-машины.


 Ваше сообщение должно содержать от 20 до 3000 символов!
Ваше сообщение должно содержать от 20 до 3000 символов!